 Асинхронный электродвигатель имеет возможность самостоятельного запуска из-за взаимодействия между вращающимся потоком магнитного поля и потоком обмотки ротора, вызывая высокий ток в нём. В результате статор потребляет большой ток, который к моменту достижения двигателем полной скорости становится больше номинального, что может привести к нагреву двигателя и его повреждению. Для предотвращения этого необходимо устройство плавного пуска электродвигателя (УПП).
Асинхронный электродвигатель имеет возможность самостоятельного запуска из-за взаимодействия между вращающимся потоком магнитного поля и потоком обмотки ротора, вызывая высокий ток в нём. В результате статор потребляет большой ток, который к моменту достижения двигателем полной скорости становится больше номинального, что может привести к нагреву двигателя и его повреждению. Для предотвращения этого необходимо устройство плавного пуска электродвигателя (УПП).
Принцип работы пускателя
Он заключается в том, что устройство регулирует напряжение, приложенное к двигателю во время пуска, контролируя характеристики тока. Для асинхронных двигателей пусковой момент приблизительно пропорционален квадрату пускового тока. Он пропорционален приложенному напряжению. Крутящий момент также можно считать приблизительно пропорциональным приложенному напряжению, таки образом регулируя напряжение во время пуска, ток, потребляемый машиной, и его крутящий момент контролируются устройством и могут быть уменьшены.
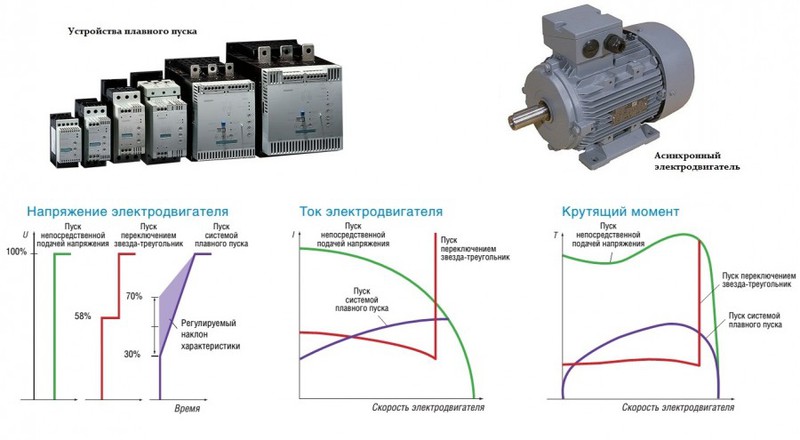
Используя шесть SCR в конфигурации, как показано на рисунке устройство плавного пуска может регулировать напряжение, подаваемое на двигатель при запуске от 0 вольт до номинального линейного напряжения. Плавный пуск электродвигателя может осуществляться тремя способами:
- Прямой запуск с применение полного напряжения нагрузки.
- Применяя постепенно пониженное.
- Применение пуска частичной обмотки с помощью стартёра автотрансформатора.
УПП могут быть двух типов:
- Открытое управление: напряжение пуска подаётся с задержкой во времени независимо от тока или скорости двигателя. Для каждой фазы два SCR проводятся сначала с задержкой на 180 градусов в течение соответствующих полуволновых циклов (для которых выполняется каждый SCR). Эта задержка постепенно уменьшается со временем до тех пор, пока приложенное напряжение не достигнет номинального значения. Она также известна, как система временного напряжения. Этот метод фактически не контролирует ускорение двигателя.
- Контроль замкнутого контура: контролируются любые характеристики выходного сигнала двигателя, такие как текущий ток или скорость. Пусковое напряжение изменяется соответственно для получения требуемого отклика. Таким образом, задачей УПП является контроль угла проводимости SCR и управление напряжением питания.
Преимущества плавного пуска
Твердотельные плавные пускатели используют полупроводниковые приборы для временного снижения параметров на клеммах двигателя. Это обеспечивает контроль тока двигателя, чтобы уменьшить крутящий момент предельного значения двигателя. Управление основано на управлении напряжением клемм двигателя на двух или трёх фазах.
Несколько причин, почему этот метод предпочтительнее других:
- Повышенная эффективность: эффективность системы УПП с использованием твердотельных переключателей обусловлена в основном низким состоянием напряжения.
- Управляемый запуск: пусковые параметры можно контролировать, легко изменяя их, что обеспечивает запуск его без каких-либо рывков.
- Управляемое ускорение: ускорение двигателя контролируется плавно.
- Низкая стоимость и размер: это обеспечивается с использованием твердотельных переключателей.
Компоненты твердотельных устройств
 Выключатели питания, такие как SCR, которые подвергаются фазовому контролю для каждой части цикла. Для трехфазного двигателя два SCR подключаются к каждой фазе. Реле плавного пуска электродвигателя должны быть рассчитаны как минимум в три раза больше, чем линейное напряжение.
Выключатели питания, такие как SCR, которые подвергаются фазовому контролю для каждой части цикла. Для трехфазного двигателя два SCR подключаются к каждой фазе. Реле плавного пуска электродвигателя должны быть рассчитаны как минимум в три раза больше, чем линейное напряжение.
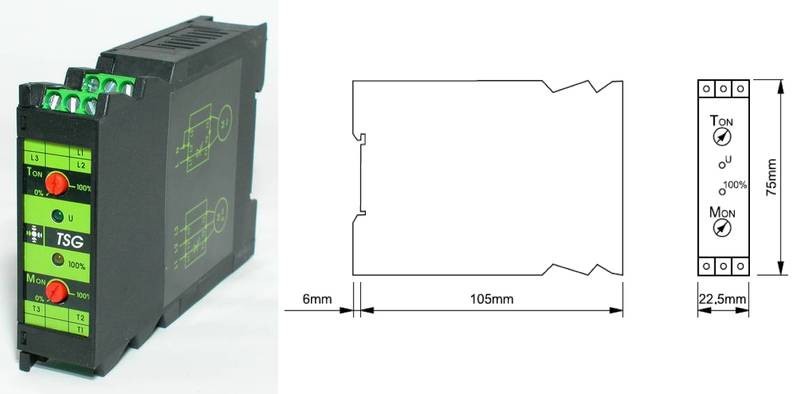
Рабочий пример системы для трехфазного асинхронного двигателя. Система состоит из 6 SCR, контрольной логической схемы в виде двух компараторов — LM324 и LM339 для получения уровня и напряжения рампы и оптоизолятора для управления приложением напряжения затвора к SCR на каждой фазе.
Таким образом, управляя длительностью между импульсами или их задержкой, управляемый угол SCR контролируется и регулируется подача питания на этапе пуска двигателя. Весь процесс на самом деле представляет собой систему управления с разомкнутым контуром, в которой контролируется время применения импульсов запуска затвора для каждого SCR.
Основы SCR
SCR (Silicon Controlled Rectifier) представляет собой управляемый стабилизатор мощности постоянного тока с высокой мощностью. Устройства плавного пуска асинхронных двигателей SCR представляет собой четырехслойное кремниевое полупроводниковое устройство PNPN. Оно имеет три внешних терминала и использует альтернативные символы на рисунке 2 (a) и имеет транзисторную эквивалентную схему на рисунке 2 (b).
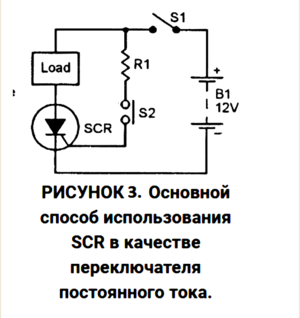
Основной способ использования SCR в качестве переключателя с анодом, положительным относительно катода, управляемым в момент запуска машины.
Основные характеристики SCR можно понять с помощью этих диаграмм. Устройство плавного пуска электродвигателя можно включить и заставить действовать как выпрямитель с прямым смещением кремния, кратковременно применяя к нему ток затвора через S2. SCR быстро (в течение нескольких микросекунд) автоматически защёлкивается во включённое состояние и остаётся включённым даже при удалении привода затвора.
 Это действие показано на рисунке 2 (b) ток начального затвора включается Q1, а ток коллектора Q1 включается Q2, ток коллектора Q2 затем удерживает Q1, даже когда привод затвора удаляется. Потенциал насыщения составляет 1 В или около того и создаётся между анодом и катодом.
Это действие показано на рисунке 2 (b) ток начального затвора включается Q1, а ток коллектора Q1 включается Q2, ток коллектора Q2 затем удерживает Q1, даже когда привод затвора удаляется. Потенциал насыщения составляет 1 В или около того и создаётся между анодом и катодом.
Для включения SCR требуется только короткий импульс затвора. Как только SCR будет зафиксирован, он может быть снова отключён, кратковременно уменьшая его ток анода ниже определённого значения, как правило, несколько миллиампер, в приложениях АС выключение происходит автоматически в точке пересечения нуля в каждом полупериоде.
Значительный коэффициент усиления доступен между затвором и анодом SCR, а низкие значения тока затвора (обычно несколько мА или меньше) могут контролировать высокие значения анодного тока (до десятков усилителей). Большинство SCR имеют анодные номиналы в сотни вольт. Характеристики затвора SCR аналогичны характеристикам транзисторного соединения — эмиттера транзистора (см. Рис. 2 (b)).
Внутренняя ёмкость (несколько pF) существует между анодом и затвором SCR, и резко возрастающее напряжение, появляющееся на аноде, может вызвать достаточный прорыв сигнала к затвору для включения SCR. Этот «эффект скорости» может быть вызван переходными процессами на линии питания и т. д. Проблемы с эффектом скорости можно преодолеть, проводя сеть сглаживания CR между анодом и катодом, чтобы ограничить скорость подъёма до безопасного значения.
Операция с переменной скоростью вращения
 Сетевое напряжение переменного тока (рис. 5) выпрямляется с помощью пассивного диодного моста. Это означает, что диоды срабатывают, когда линейное напряжение больше напряжения на секции конденсатора. Результирующая форма волны имеет два импульса в течение каждого полупериода, по одному для каждого окна диодной проводимости.
Сетевое напряжение переменного тока (рис. 5) выпрямляется с помощью пассивного диодного моста. Это означает, что диоды срабатывают, когда линейное напряжение больше напряжения на секции конденсатора. Результирующая форма волны имеет два импульса в течение каждого полупериода, по одному для каждого окна диодной проводимости.
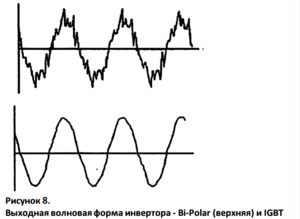
Форма волны показывает некоторый непрерывный ток, когда проводимость переходит от одного диода к следующему. Это типично, когда он используется в звене постоянного тока привода и присутствует некоторая нагрузка. Инверторы используют широко-импульсную модуляцию для создания выходных сигналов. Треугольный сигнал генерируется на несущей частоты, с которой инвертор IGBT переключится.
Эта форма сигнала сравнивается с синусоидальной формой волны на основной частоте, которая должна быть доведена до двигателя. Результатом является волновая форма U, показанная на рисунке.
Выход инвертора может быть любой частотой ниже или выше частоты линии до пределов инвертора и/или механические пределы двигателя. Нужно обратить внимание на то, что привод всегда работает в пределах рейтинга скольжения двигателя.
Процесс регулирования пуска
Сроки включения SCR — это ключ к управлению выходом напряжения для УПП. В течение пуска логическая схема УПП определяет, когда включить SCR. Он не включает SCR в точке, где напряжение идёт от отрицательного к положительному, но ждёт некоторое время после этого. Это известный процесс, называемый как «постепенное восстановление» SCR. Точка включения SCR установлена или запрограммирована тем, что начальный крутящий момент, начальный ток или ограничение тока строго регулируется.
 Результат поэтапного восстановления SCR представляет собой несинусоидальное пониженное напряжение на выводах двигателя, которое показано на рисунках. Поскольку двигатель является индуктивным, а ток отстаёт от напряжения, SCR остаётся включённым и проводит, пока ток не достигнет нуля. Это происходит после того, как напряжение стало отрицательным. Выход напряжения индивидуального SCR.
Результат поэтапного восстановления SCR представляет собой несинусоидальное пониженное напряжение на выводах двигателя, которое показано на рисунках. Поскольку двигатель является индуктивным, а ток отстаёт от напряжения, SCR остаётся включённым и проводит, пока ток не достигнет нуля. Это происходит после того, как напряжение стало отрицательным. Выход напряжения индивидуального SCR.
Если сравнивать с формой полного напряжения, можно видеть, что пиковое напряжение совпадает с полным волновым напряжения. Однако ток не увеличивается до того же уровня, что и при приложении полного напряжения из-за индуктивного характера двигателей. Когда это напряжение подаётся на двигатель, выходной ток выглядит, как на рисунке.
Поскольку частота напряжения равна так же, как и линейная, частота тока тоже одинакова. SCR поэтапно переходят к полной проводимости, пробелы в токе заполняются до тех пор, пока волновая форма не будет выглядеть так же, как у двигателя.
Характеристики двигателя с использованием УПП
Такой плавный пуск асинхронного электродвигателя в отличие от привода переменного тока, имеет характеристики тока в сети и тока двигателя всегда одинаковыми. Во время запуска изменение тока зависит напрямую от величины приложенного напряжения. Крутящий момент двигателя изменяется, как квадрат приложенное напряжение или тока.
Наиболее важным фактором при оценке является крутящий момент двигателя. Стандартные двигатели производят приблизительно 180% от момента полной нагрузки при запуске. Следовательно, 25%-е снижение параметров будет равно крутящему моменту полной нагрузки. Если двигатель потребляет 600% от полного тока нагрузки при запуске, то ток в этой схеме уменьшит пусковой ток от 600% до 450% нагрузки.
Схемы подключения пускателей
 Существует два варианта, с помощью которых стартер осуществляет запуск электродвигателя: стандартная схема и внутри треугольника.
Существует два варианта, с помощью которых стартер осуществляет запуск электродвигателя: стандартная схема и внутри треугольника.
Стандартная схема. Пускатель соединён последовательно с линейным напряжением, подаваемым на двигатель.
Внутри треугольника существует ещё одна схема, по которой подключён пускатель, называется схемой внутренней дельты. В этой схеме два кабеля, которые подключаются к одному из двигателей, присоединяются непосредственно к источнику питания I/P, а другой кабель будет подключён через пускатель. Одна особенность этой схемы заключается в том, что пускатель можно использовать для больших двигателей, например, для двигателей мощностью 100 кВт, поскольку фазные токи делятся на 2 части.